SUMMIT REPORT
自動運転開発を手掛けるティアフォーが2021年4月に初開催した「Tier IV SUMMIT 2021」では、同社が推進するオープンプラットフォーム戦略を軸に据えたさまざまなトピックが提供された。
この記事では、「Logiee - 小型自動走行ロボットのプラットフォーム」のセッションで同社エンジニアが語った内容を紹介していく。
(※この記事はモビリティ業界テック系ニュースメディア「自動運転ラボ」編集部提供です)
同セッションでは、ティアフォー事業本部Vice Presidentの岡崎慎一郎氏が進行役を務め、Logiee(ロージー)の開発に携わっている技術本部プロダクトオーナーの河合道成氏、技術本部エンジニアの東出泰治氏を交えながら、Logieeの開発に至るこれまでの活動や今後の展望について思いを語った。
なお、Logieeは物資運搬を想定した小型の自動運転EVで、電動車椅子をベースとしている。屋内外問わず走行が可能で、上部に乗せるユニットを取り替えることで近距離の輸送や配達、販売、買い物などさまざまな用途に対応できる。
やや小型化した「Logiee S」、屋内用途を想定しさらに小型化した「Logiee SS」などのバリエーションがあり、パートナー企業を交えながら公道実証やビル内での実証などが進められている。
屋内を走行するLogiee=出典:サミット公式サイト
セッションはまず、Logieeの開発の背景についての言及から始まった。
岡崎氏「はじめに、小型ロボット開発を進めてきた背景について紹介を」
河合氏「小型ロボットを公道で走らせる『つくばチャレンジ』が一つのきっかけです。私個人は学生の頃から出ていたが、ティアフォーとしては2018年に初めて出場した。Autoware(オートウェア)を使って最後まで完走することで興味を持ってもらうことが目的で、その時初めて開発した小型のLogieeの検証を兼ねた」
岡崎氏「Logiee SやLogiee SSなど、Logieeを小型化していった背景は?」
河合氏「走行させたい環境が変わるにつれ、狭いところでも走行できるように小型化を進めていった。屋内で使えると研究開発を加速できるという考えもあった。小型車両であれば、気軽に屋内で走行実験できる。また、屋内実証の一番初めの目的は、エレベーターの乗り降りが可能なロボット開発。そのためにはパートナーが必要で、清水建設と共同研究することとなった。ビルそのものをマネジメントしている清水建設のシステムをまずトップに据え、そこからFleet Management System(FMS)経由で車両を動かしている。エレベーター以外にも、自動ドアや格納スペースに戻る際のシャッターとの連携なども行った」

Logieeの種類=出典:サミット公式サイト
続いて、Logieeを公道で走行させてこなかった理由について、河合氏と岡崎氏が法律的側面などから語った。
岡崎氏「これまで公道で走らせてこなかった理由は?」
河合氏「小型ロボットを公道で走らせるのはすごく難しく、自動車は法律的にどういうものか決まっているが、今までなかった小型ロボットはどこでもかしこでも走らせてはいけないと、そういうところが課題でなかなか公道では走らせることができなかったが、つい最近その向きが変わった」
岡崎氏「コロナもあって非接触配送ニーズが高まり、政府の方でもラストマイル配送向けにデリバリーロボットを使っていこうと。そのために規制緩和を進めていくことが未来投資会議の中で発表され、一気に動いた」
河合氏「動きが決まって、さっそく2020年のうちにやってしまおうと決まったのが玉野市の実証実験。実際に公道に出るとすごく大変で、今までビル内でやってきたこととは雰囲気が違い、いろいろクリアしなければならないものがあった」

セッションの様子=出典:サミット公式サイト
Logieeの開発は現在進行中だ。開発においては、一般の人や企業の人からのさまざまなフィードバックがプラスに働いているという。
東出氏「公道では一つひとつの動きに求められるレベルが違う。屋内だとLogieeがちょっとフラフラっとしても『かわいい動きしているよね』といった感じで見てくれるが、公道の路側帯走行時にフラフラっとすると、運転されている方からは『危ない』と受け止められる。Autowareは自動車全般向けに開発されているが、これを単純に持ってきても、細部の動きまでインテグレーションするのが難しかった」
河合氏「一般の方がいる環境は技術的に難しいし評価にも関わってくるが、逆にフィードバックをいろいろいただけたのが良かった。公道実証は三菱商事や地元の方々の協力が大変大きく、好意的な目というか、『こういうことができるようになるとすごくありがたい』とか『今はこういうことができるようになったんだ』とか『早くほしいね』とか、将来的に使われるいろいろな方からフィードバックを得ることができた」
「リアルなフィードバックは大事。公道に出ると横を自動車が走行するなど、技術的にもいわゆる自動車に近い部分があり、建物内を走る小型ロボットとその間みたいなところにあるのかなと」
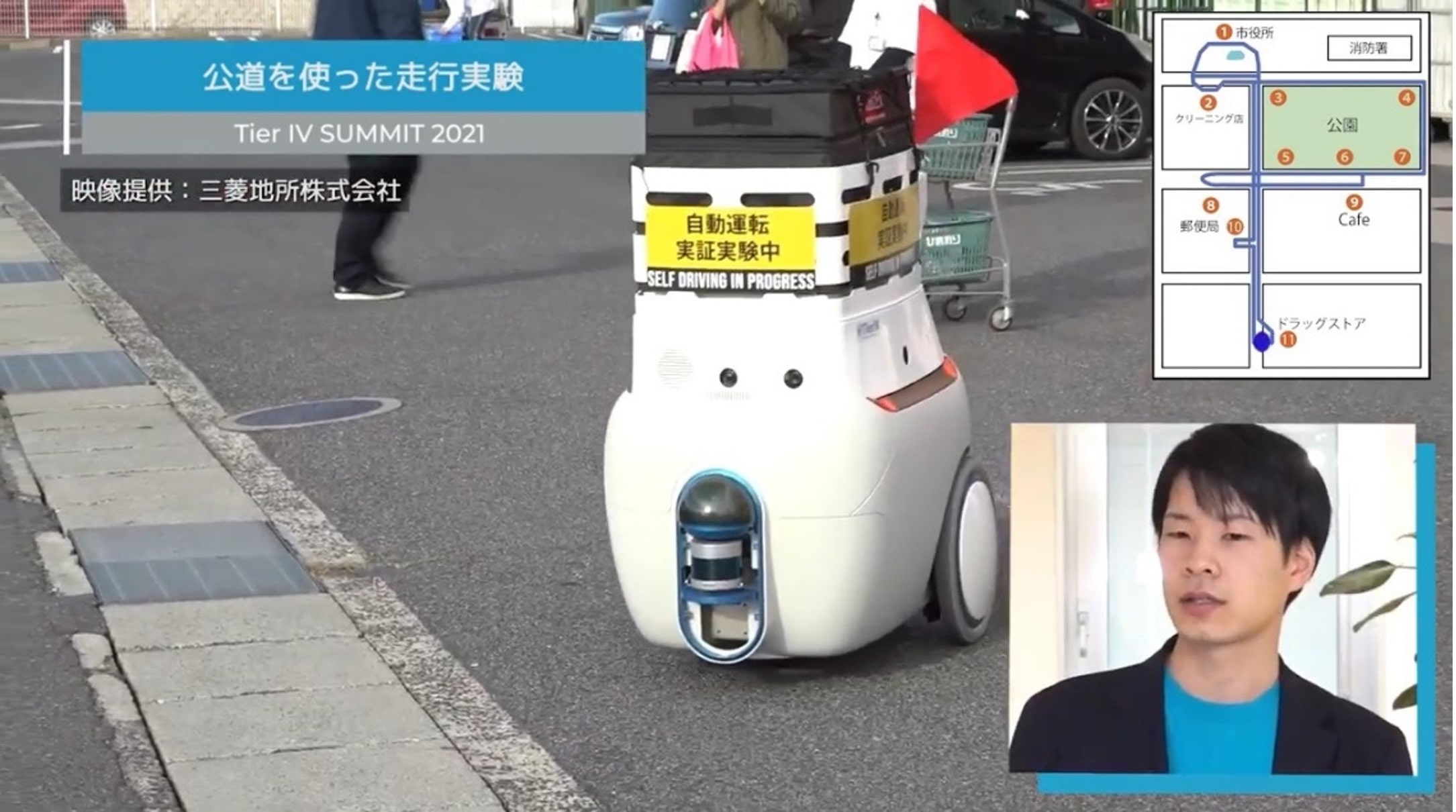
玉野市での実証の様子=出典:サミット公式サイト
自動運転車ではなく、小型の自動配送ロボットならではのメリットや可能性についても、セッションでは言及された。
岡崎氏「地元の方から『次はいつやるの』といった声もあったが、ティアフォーとして今後どのようにやっていくのか。Logieeを使った開発や実証実験を進めてきたが、こうした小型走行ロボットにどのような可能性を感じているのか、またティアフォーだからこその勝ち筋はどのようなところにあるのか。小型ロボットだからこそ新しい技術にチャレンジしやすいと思うが、実際、開発者からするとどうなのか?」
東出氏「安全基準が自動車とは違って、自動車の場合、例えば路駐車両や人を避けるといったリアルな実験をする場合、大規模な施設だったり、すごく安全に気を使ってリスクを感じてやらなければならないが、Logieeだとそれよりも低い基準でできるのは大きい。行動計画の面でも、基本的にシミュレーターで試していくが、インテグレーションしたときに起こる問題は必ずある。それになるべく早く気づきたいが、小型ロボットであれば早い段階から問題解決のプログラムを書くことができ、こうしたサイクルを回していけるのは会社にとってすごく重要なことと思う」
岡崎氏「Logieeの技術をほかの車両に移していくこともできる?」
河合氏「ティアフォーで新しいものを試そうと思ったとき、一番はじめに入るのが小型の自動走行ロボットではないかと思う。小型なので、新技術のチャレンジのしやすさみたいなものがある」
東出氏「Autowareが自動車だけでなくLogieeや工場内の自動搬送ロボットなど、プラットフォーム共通のソフトウェアになっていることが重要。どこかで開発された技術がほかのプロダクトにも相乗効果を発揮する」
岡崎氏「自動運転開発は、開発にも検証にも手間がかかるが、ティアフォーだと効率的に進めやすいところがある。玉野市の実証では、地元の方に荷物を届けるなど、サービスに近いイメージを試せたと思う。小型ロボットはそこが一つの特徴で、最終的にイメージするサービスに至るスピード、社会実装が早いのが一つのポイントかなと。開発したものを最終的なサービスに近づけやすい」
河合氏「自動車と小型走行ロボット、どっちが先に世の中に出ていくかと考えると、物を運ぶことから(小型配送ロボットの方が)早く世の中に出てくるのではないか。自動運転車は世界的に見るといろいろなところでサービスインしているが、根付いているところまではまだ来ていないと思う。反面、小型の自動走行ロボットは普通に街中に溶け込んでいるようなイメージもある。開発側からすると気になるところ」
岡崎氏「公道を走る小型走行ロボットは2年前くらいまでは開発企業はあってもサービスに近いところまでやっているところは少なかったが、去年1年くらいで大きく動いた印象。コロナがあって、非接触配送ニーズが高まって、実際にお客さまからお金をいただくサービスをやるところがすごく増えた。自動車を使った自動走行は、バスやタクシーがすでにあるようにニーズは確実にある一方、小型ロボットがどのくらいニーズがあるのかと思ったが、海外の動きを見るとニーズが高まっており、社会受容性が高いという印象。玉野市でも、新しい技術をいきなり地元に使ってもらっても自然に溶け込んでいた。ニーズが高まり、それに合ったプロダクト、サービスが提供できれば、実際のサービスとして使われていくのではないか。ティアフォーとしてはそういうところに貢献していきたい」

小型ロボットの可能性について語る河合氏=出典:サミット公式サイト
ティアフォーが開発する「Autoware」は、自動運転車ではもちろん活用可能だが、Logieeのような小型自動走行ロボットにも搭載できる。しかし、車両と小型ロボットではサイズ感などさまざまな違いがある。実際の開発エンジニアはこうした点をどう考えているのか。
岡崎氏「規制緩和やニーズの高まりからいろんなタイプのロボットが求められてくると思うし、いろいろな企業が小型自動走行ロボットの開発を進めると思う。その中で、ティアフォーはAutowareというコアになる自動運転ソフトウェアを開発していて、それを自動車にも使えるしLogieeにも使えるのが一つの特徴だと思う。ほかの車両タイプと共通した開発は、やりやすいところと難しいところとあると思うが、開発している側としてはどうか?」
東出氏「玉野市の実証で言えば、Logieeのサイズだけを意識してソフトウェアを作った方が多分楽だと思う。ほかの車両のふるまいなどを考えたとき、どういう風に作ればよいか考えるのはすごく難しく、ティアフォーはそこにチャレンジしているがそれはすごく重要なこと。例えば屋内で走るLogieeと屋外で走るLogiee、安全性に対し求められるレベルがぐっと変わる。それに対し一から実装して作っていくとなると結構大変な作業だが、ティアフォーはAutowareとしてタクシーでも走れるような安全設計のソフトウェアがすでに開発されていて、それをそのままLogieeに持ち込めばいいので、結果的に開発スピードが上がる」
岡崎氏「今回、Autowareだけでなく配車管理システムのFMSとか遠隔監視システムとか、自動車で使っているシステムをLogieeに持ってきた。自動運転はいろんな要素技術や必要なソフトウェアがると思うが、それを使いまわせるところもポイントでは?」
東出氏「Logieeでサービスインまで見据えて高いレベルのものを開発し、そのフィードバックがほかのプロジェクトにも生かされるのは大きなポイント」
岡崎氏「小型走行ロボットでは、ベースが異なるハードウェアを使ったりしていると思うが、Logieeは『こういうハードウェアじゃないと使えない』とかあるのか」
河合氏「Autowareのすごいところはその制限がほとんどない点。いろんな車両をAutowareで動かすことができる。ハードウェアのこだわりはほとんどない」
岡崎氏「配送や警備ロボット、清掃ロボットなど、いわゆるサービスロボットはいろんな種類がある。これから実際にニーズが見えてきて、ティアフォーとして小型走行ロボットにどう取り組んでいくのか、どう勝つつもりなのかがすごく大事になると思うが、ティアフォーの戦略はすごくシンプルで、Autowareというコアな自動運転ソフトウェアをオープンソースで提供していて、そのソフトウェアは我々も開発しているし海外含めさまざまな人が開発を進めており、検証が進んでいる。このAutowareをさまざまなプレイヤーに提供することで、一から自動運転システムを作らずともすぐに自動走行化できる。さまざまな人たちと組み、ソフトウェアプラットフォームを提供することで開発を加速することができ、本当に困っている人たちのところに早くサービスを届けられるかもしれない。社会実装を早めることができる。その意味でも、個人的にはLogieeのプロジェクトを大事にしていきたい」

進行を務める岡崎氏=出典:サミット公式サイト
最後に、Logieeを通じて作り上げていきたい世界観などについて3氏が語った。
河合氏「やはりオープンソースとプラットフォーム戦略に尽きる。ティアフォーは自動運転の会社。自動車を自動化する会社がなぜ小型の自動ロボットやてるのかというと、社会受容性やいろんなパートナーと組むこと、これが今後自動運転を進歩させていくのに一番大事なキーとなる。いろいろな車両の自動運転を加速させていくために小型自律移動ロボットをやっていきたい」
東出氏「ティアフォー内でも各プロジェクト間で違う気付きがいろいろあって、こうした気づきからソフトウェアがどんどん良くなっていく。それをオープンソースにしていくと、例えばLogieeを使ってくれている大学の研究室など、ティアフォーがやっていない設定で出てきた課題を彼らのアイデアが解決し、それをオープンソースにコミットしてくれると、みんなでソフトウェアを良いものにしていける世界ができていけば」
岡崎氏「仲間づくりはすごく大事。小型走行ロボットは今後日本だけでなく世界中で走る。そこにティアフォーの技術が入っていき、向こうからも色々なフィードバックをもらえるような形を作っていって、サービスが求められる人たちに早く提供されるように貢献していきたい」

世界観について語る東出氏=出典:サミット公式サイト
ティアフォーにおける小型走行ロボットの開発は、「Autoware」によるオープンプラットフォーム戦略の一部であるようだ。
自動運転技術の活用は、自動車タイプにとどまらずさまざまな用途を担うロボットにも広がっている。ハードウェアが多様化する中、汎用性の高いAutowareが活躍する場面は今後いっそう増加していくことが予想される。また、さまざまな企業がAutowareを活用することで、Autowareそのものの機能もより高度化・拡張されるという好循環を生む。
Logieeは、こうした自動運転開発や社会実装を促進する旗振り役としても高い期待を寄せられているのだ。
このセッション動画をアーカイブ配信しています。
Youtube「Tier IV SUMMIT 公式チャンネル」にてご覧ください。

開催当日にログインすることでセッション配信を閲覧することができます。


